Annelio
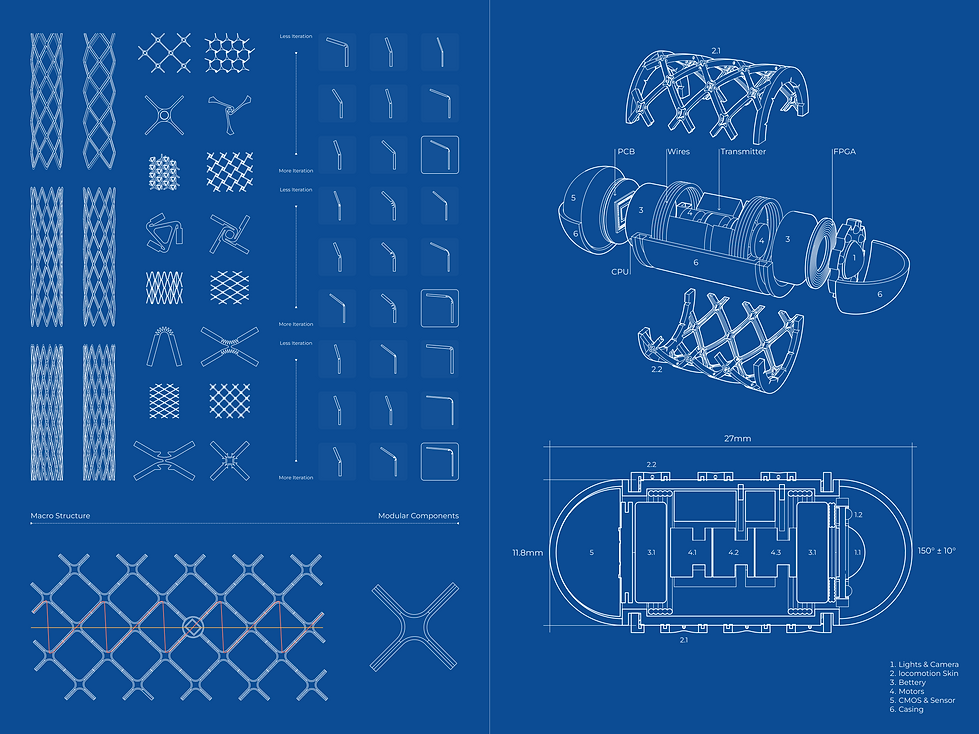
Annelio is a bio-inspired, soft-bodied robotic skin system designed to enable adaptive peristaltic locomotion for ingestible capsule robots navigating the human gastrointestinal tract. Drawing inspiration from earthworm muscular mechanisms, we developed a deformable scissor-structured shell capable of segmental contraction and extension. Through a combination of biological research, digital simulations, structural optimization, and physical prototyping, the project explores how compact, programmable motion skins can improve control, reduce retention risk, and support miniaturization in medical devices. The scalable design approach further opens possibilities for broader applications, such as soft-bodied exploration in complex terrains or adaptive systems for pipeline inspection.
Jan 2025 - May 2025
Team Project:
Bo Li, Shiyuan Tian, Zijie Zhou
Skills:
Bio-Inspired Design, Robotiecs, Fabrication, Arduino, Parametric Modeling, Computational Simulation, Iterative Prototyping